Haberler

NAVSTAR ağı dayalı Küresel Konumlama Sistemi (GPS), fotogrametri ve uzaktan algılama sanayi neredeyse on yıldır uzayda kamerayı yerleştirmek için gerekli olan santimetre düzeyinde doğruluğu sağlamıştır. fotogrametri ve uzaktan algılama topluma son yıllarda yolunda yapılan bir başka yeni teknoloji atalet navigasyon sistemleri (INS) bulunmaktadır.
GPS sadece toprak yüzeyinde bir radyo alıcısına Yörüngedeki uydulardan gelen yayınlanan radyo sinyallerinin sürekli bir dizi olarak görülebilir. Bu sinyaller uyduların bilinen pozisyon efemeris bilgi içeren, ölçüm her uydu için mesafe (aralık) gösteren veriler ve alıcıya göre uyduların göreceli hızı açıklayan bilgiler. Basit bir matematiksel rezeksiyon hesaplama, bir noktanın konumunu belirlemek için kullanılır. GPS alıcıları X, Y, her an her uydunun Z koordinatları (dönem) gözlem yapılır hesaplamak için ephemeris uydudan yayın diğer sabitleri kullanın. dört veya daha fazla uyduya mesafeler ölçüldüğünde, X, Y, Z rezeksiyon formüller ile hesaplanabilir işgal noktanın koordinatları.
GPS araştırmaları, statik anketler ve kinematik anketler iki türü vardır. GPS anketleri genellikle sözde diferansiyel modunda gerçekleştirilir. Bu, başka bir alıcı bilinmeyen koordinatları ile uzaktan ya da fitil noktasında (kamera istasyonu) yerleştirilmiş ise en az bir alıcı, tam olarak bilinmemektedir koordinatları bir noktaya yerleştirilen baz veya master istasyon denir anlamına gelir. çözüldü vektör aslında uzak istasyona baz istasyonundan koordinat farklılıkları olduğunu. uzak istasyon koordinat çözümü her zaman ana bilinen koordinatlara göre olduğundan bu kadar göreceli konumlandırma denir. Diferansiyel veya göreli GPS anketleri kullanarak ve hangi modu işlemek vardır alıcıları hangi bağlı metre, desimetre veya santimetre seviyesine doğru olabilir. Göreli konumlama yaygın gezinmek ve daha doğrusu uçağı konumlandırmak için hava fotoğrafçılığı kullanılır.
Bağıl Kinematik GPS Konumlandırma
Havadan GPS (ABGPS) hava fotoğrafları için fotoğraf merkezlerinin doğru konumunu belirlemek için verilen addır. Proje sınırlı bir alanı kapsar ve GPS baz istasyonu projesinin merkezi yakınında yer olduğunda 2 ila 5 cm kadar yüksek doğruluk elde edilebilir. Anket sınıf çift frekanslı GPS alıcıları bu yüksek doğruluk elde edilmesi için gereklidir. Uçakta GPS alıcısı da poz (olay seçeneği) tam anı kayıt yeteneği ile donatılmış olmalıdır. Bazı durumlarda, uçuş navigasyon sistemi GPS alıcısı olay seçeneği gerekli olmaz ki fotoğraf pozlama süreleri kaydeder. çıkışına maruz orta tam zamanı donatılmış bir kamera da gereklidir, ve havadaki GPS alıcısına makinesini bağlayan bir kablo zamanı kaydedilir GPS alıcısına kameradan bu darbe gönderir.
Bir ABGPS baz istasyonunun için optimum konum proje alanının merkezine yakın bir havaalanında olduğunu. Havaalanları uydu sinyalleri engellemek için birkaç engel bulunmadığından bu yana mükemmel sitelerdir. Baz istasyonu uçağın yakınında yer almaktadır Ayrıca, uçak GPS alıcısı birkaç dakika içinde (düzeltme tamsayı belirsizlikler) hızlı başlatmak mümkün olacak. Bir baz istasyonu, genellikle bir operatör maliyet tasarrufu, bir havaalanında sahipsiz bırakılabilir.
GPS konumlama WGS84 dayanır. ulusal şebekeye bir koordinat dönüşüm gereklidir koordine eder. dönüşüm kendisine ek olarak, sıfır noktası transferi, bu dolaylı bir referans noktası ile yapılmazsa riayet edilmesi gerekir. Z WGS84 koordinatları çünkü ek olarak, Geoit dalgalanmalar elipsoidal yükseklikleri ve Geoid ilgili ulusal koordinat sisteminde (ortometrik yükseklikler), olmayan yükseklikleri saygı gerekir. noktaları kontrol etmek için yerel bir dönüşüm ile, Geoid etkisi en aza indirilebilir.
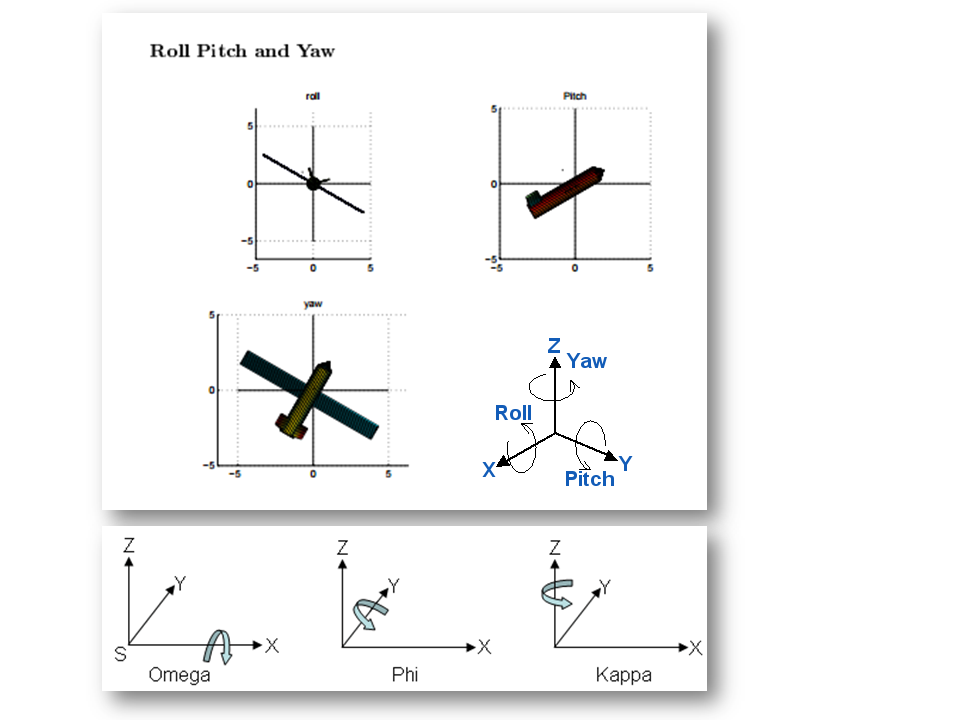
Bugün bir Atalet Seyrüsefer Sistemi (INS) ile dış yöneltme parametrelerinin dönme açıları tespit etmek de mümkündür. Bir INS iki ana bileşenden oluşur. İlk üç ivme, üç gyros ve gerekli elektronik oluşmaktadır atalet ölçüm birimi (IMU) 'dir. ivmeölçerler IMU yaşadığı spesifik kuvvet vektörü ölçen bir ortogonal triadı olarak düzenlenmiştir. jiroskoplar aynı şekilde IMU yaşadığı açısal hız vektörü ölçen bir ortogonal üçlünün halinde düzenlenir. Yüksek veri hızları yeterince kısa vadeli titreşim dinamiklerini yanı sıra uzun vadeli araç dinamiklerini örnek gereklidir. İkinci bileşen navigasyon işlemcisi. Ölçülen ivmeleri ve açısal oranları dayalı döner yeryüzünde IMU hareket için Newton'un denklemleri çözer.
fotogrametrik kameraya IMU sistemi ilişkisi bloğu içinde tespit edilmesi halinde, bu sistemler +/- 0,003 ° hassasiyetle kadar olan dönme açıları ölçebilir. Bu hassasiyet, tüm orthophoto üretme alanında yeterlidir. Ancak büyük ölçekli haritalama projeleri, ek kontrol noktaları veya GPS ve IMU verileri ile birlikte blok ayarı için gereklidir. Vardiya belirlemek ve en az iki kontrol noktası, her şerit için veya proje alanı en az iki ilave çapraz şeritler ile kaplıdır kullanılabilir olup olmadığını GPS verileri (6 parametreleri) parametrelerini sürüklenme mümkündür.
GPS ve INS kullanımı ile, dış yöneltme parametreleri doğrudan (direkt Georeferencing) elde edilir. Bu nedenle, bir paket blok ayarlaması için gerekli kontrol noktalarının sayısı önemli ölçüde azaltılabilir. Doğrudan iyi planlanmış misyonundan EO parametreleri ölçülmüş ve düzgün çalıştığından GPS / IMU sistemi birçok fotogrametrik uygulamalarda kullanılmak üzere yeterince doğru. Ancak, kritik bir konu kalite kontrol ve EO parametreleri kalite güvencesi (QC / QA) 'dir.
fotogrametri GPS ve INS sistemlerinin kullanımı, bir yandan, başından beri son derece doğru dış yöneltme parametreleri sağlayarak nirengi (AT) paketleri desteklemek ve oryantasyon sonuçlarının kalitesini ve güvenilirliğini artırabilir. Gerekli kravat noktalarının sayısını ve kravat noktası alanlarının dağılımı azaltarak otomatik aerotriangulation noktası ölçümü işlemini kamera ve / veya kendi kendine kalibrasyon gerçekleştirmek ve kolaylaştırmak için de mümkündür.
{kind=link}